[CGDI] Geometry Processing: Discrete Differential Operators on Meshes and Dirichlet Problems
===
> [name="David Coeurjolly"]
ENS [CGDI](https://perso.liris.cnrs.fr/vincent.nivoliers/cgdi/)
[TOC]
---
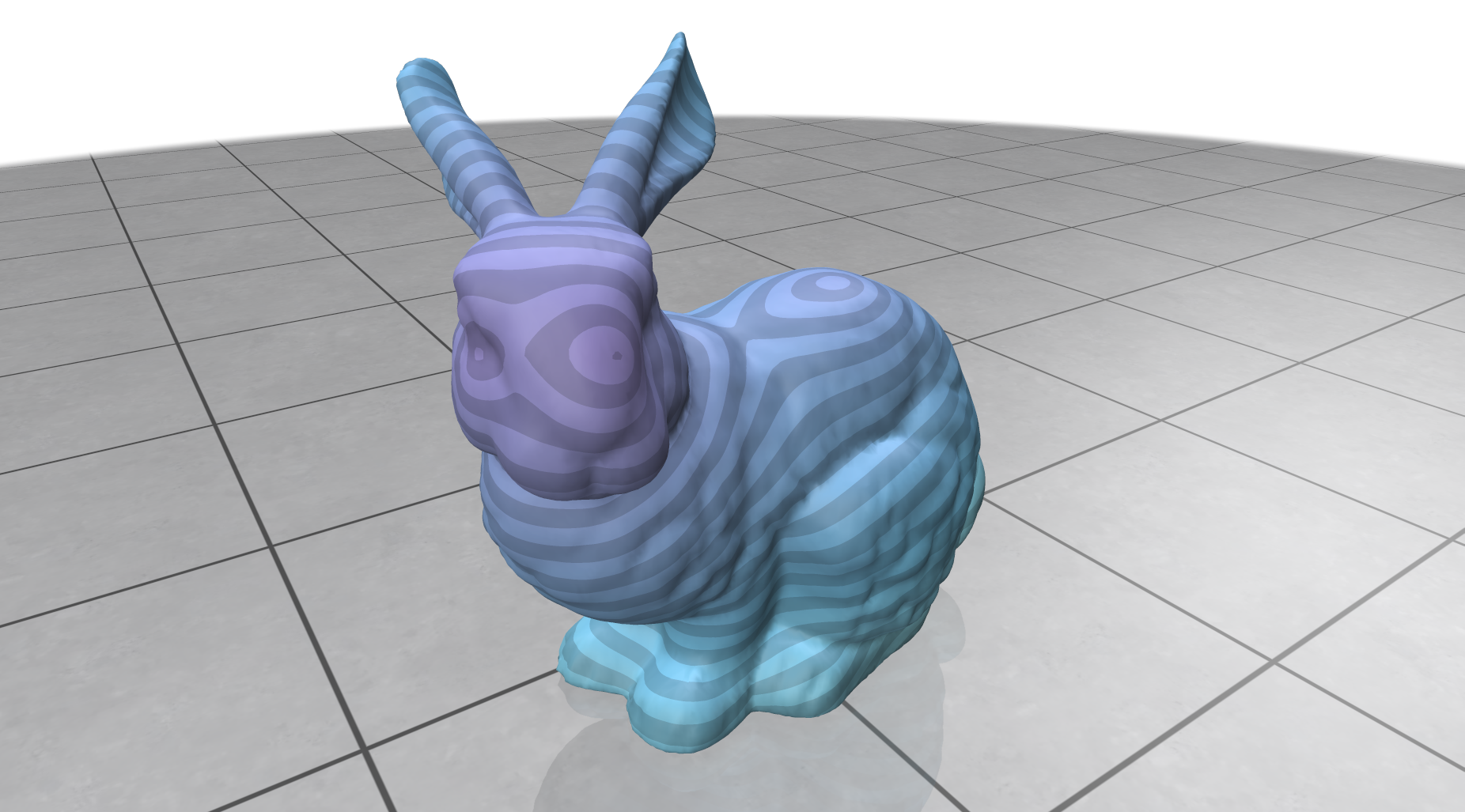
In this lecture, we will be playing with differential estimators and solving PDE on meshes, such as Poisson based geodesics:
::: info
For this practical, you would need either a `c++` and a `python` to load an OBJ and circulate on a manifold mesh structure (cf Practical 4).
:::
# Basic Differential Operators
Let us consider the class of piecewise smooth linear functions defined at the mesh vertices. More precisely, the value at a point $p$ with barycentric coordinates $\{\phi_i, \phi_j,\phi_k\}$ in the triangle $t_{ijk}$ is
$$ f(p) = f_i \phi_i + f_j \phi_j + f_k\phi_k\,.$$
where $\{f_i, f_j,f_k\}$ are the function values at vertices $i,j,k$.
:::success
This corresponds to considering classical "hat" basis functions from conformal [Finite Element Methods](https://en.wikipedia.org/wiki/Finite_element_method).
:::
1. **Warm-up** Create a simple code that opens an OBJ file (*e.g.* `spot.obj`) and assigns to each vertex, a scalar value depending on the vertices positions (as a linear or trigonometric function of the vertex positions). This will be your $\{f_i\}$ function. *E.g.*:
| Linear | Sin |
| -------- | -------- |
| 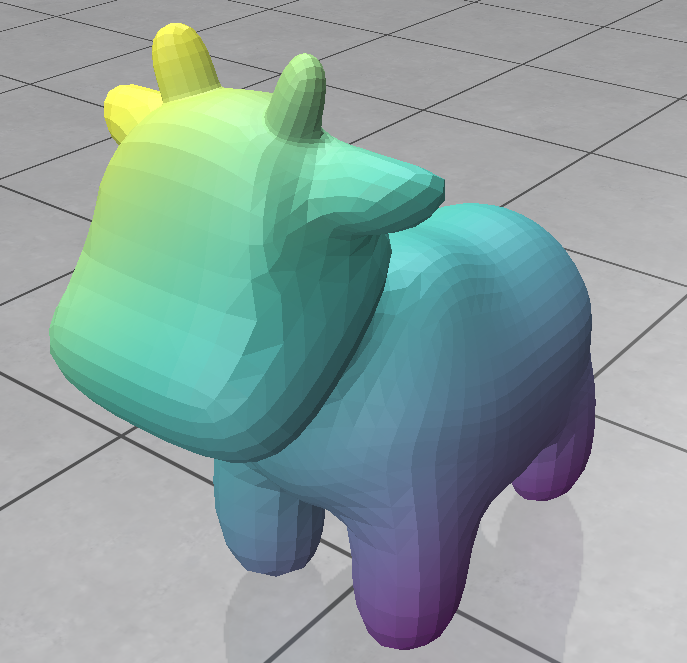 | 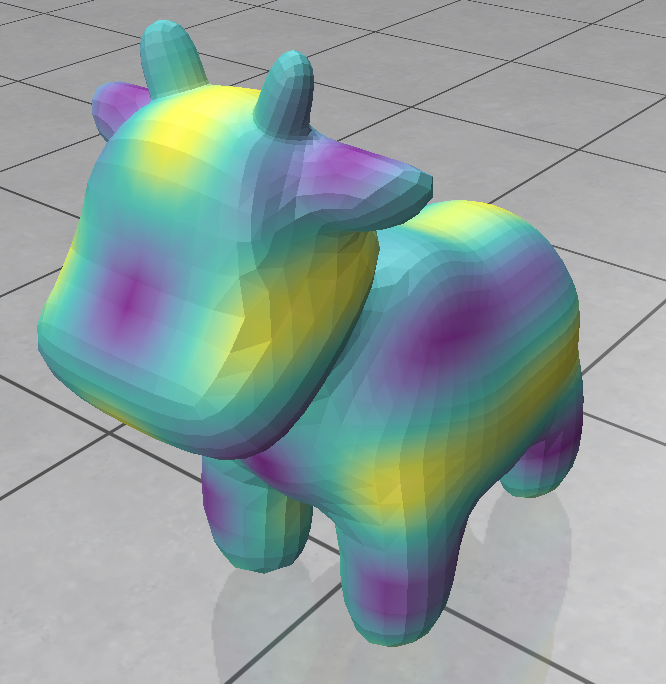 |
::: info
Just use a `addVertexScalarQuantity`/`add_scalar_quantity` and let polyscope linearly interpolate on the faces?
:::
One the most basic operators on scalar functions is the gradient. As the function being piecewise linear on the faces, we expect a constant gradient per face (aka **vertex-based gradient**) given from the gradient of the basis functions $\nabla\phi_i$:
$$ \nabla f(p) = f_i \nabla\phi_i + f_j \nabla\phi_j + f_k\nabla\phi_k\,.$$
with
$$ \nabla \phi_i := \frac{1}{2 a_{t_{ijk}}} \left(\vec{n~}_{ijk}~\times \vec{e~}_{jk}\right)$$
($a_{t_{ijk}}$ is the area of the triangle, $\vec{n~}_{ijk}$ is normal vector and $\vec{e~}_{jk} := (x_k - x_j)$ the *edge vector*).
2. Compute the necessary quantities (or retrieve them from the API): the area and the normal vector for each triangle.
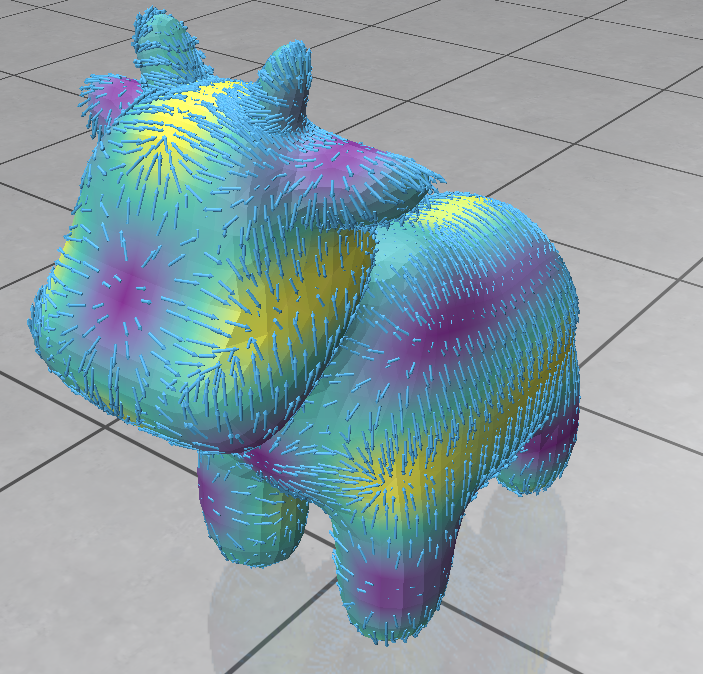
3. Write a function that, for each triangle, its area, its normal vector and the three values $\{f_i, f_j,f_k\}$, computes the per face gradient of $f$ (and attach it to the geometry as a `FaceVectorQuantity` in `polyscope`).
You should get something like:
On instrinsic vector fields, two extra quantities will be needed: the [divergence](https://en.wikipedia.org/wiki/Divergence) ("$\operatorname{div}$" or "$\nabla\cdot$") and the [curl](https://en.wikipedia.org/wiki/Curl_(mathematics)) ("$\operatorname{curl}$" or "$\nabla\times$") . For short, the divergence is a scalar value that measures how a vector field converges or diverges (it accounts to sinks and sources). The curl measures how the vector field *rotate* in a given neighborhood.
:::info
Any vector field can be decomposed into a divergence-free part, a curl-free one and a harmonic part (aka [Helmholtz-Hodge decomposition of VF](https://en.wikipedia.org/wiki/Helmholtz_decomposition)):

:::
In the setting of the practical (2D discrete triangular surfaces embedded in $\mathbb{R}^3$), one can discretize the divergence and curl at vertex $v_i$ of a per-face vector field $U$ as:
$$\operatorname{div}(U)_i = - \sum_{t_{ijk}\supset v_i} \vec{u~}_{ijk}\cdot (\vec{n~}_{ijk}\times\vec{e~}_{jk}) $$
and
$$\operatorname{curl}(U)_i = \sum_{t_{ijk}\supset v_i} \vec{u~}_{ijk}\cdot \vec{e~}_{jk} $$
::: success
**Note**: From vector caclulus, the curl is a vector. In our setting, 2d surface embedded in $\mathbb{R}^3$ and curl of intrinsic vector fields, the above scalar formula corresponds to the norm of the curl which is in the direction of the normal vector.
:::
4. Compute and display the divergence of $\nabla f$. The divergence must be positive on *sources* and negative on *sinks*.
:::info
For gradient of scalar functions $f$, we have $\operatorname{curl}(\nabla f) = 0$.
:::
5. **extra** As a sanity checks, you can verify the basic fundamental properties on calculus:
$$ \operatorname{div}(U) = \operatorname{curl} Rot U\quad $$
($Rot \vec{u~}_{ijk} := \vec{n~}_{ijk}\times \vec{u~}_{ijk}$, rotation of a vector field by 90 degrees -anti-clockwise for outward normal vectors- around the normal vector.)
::: success
**Note** that these basic operators can be nicely extended to polygonal meshes (non-convex, non planar faces) [^1].
:::
::: info
The divergence operator will be used in the last part of the practical.
:::
# Laplace-Beltrami
From the above-mentioned operators, one can define the [Laplace-Beltrami](https://en.wikipedia.org/wiki/Laplace–Beltrami_operator) operator as $\Delta f:= - \operatorname{div}(\nabla f)$. On triangular meshes, we end up with the classical "cotan" Laplace-Beltrami operator as a linear operator on vertices $V$ (aka matrix $|V|\times |V|$). Its **weak form** is
$$
L_{ij} = \left\{
\begin{array}{l}
-\omega_{ij}\quad\text{$ij$ is an edge}\\
\sum_{k\in N(i)} \omega_{ik}\quad\text{$i=j$}\\
0 \quad\text{otherwise}
\end{array}\right .
$$
with
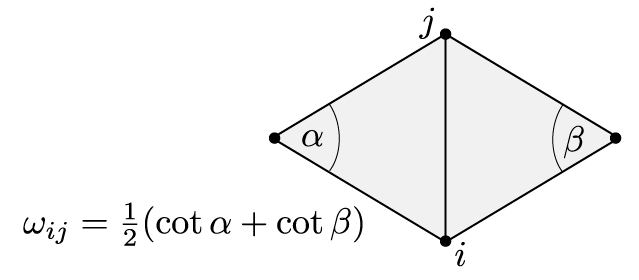
If $M$ denotes the $|V|\times |V|$ **mass matrix**, the diagonal matrix where $M_{ii}$ is the **vertex area** of the vertex $i$. There are several ways to define this vertex area. For the sake of simplicty for the practical, we can simply consider one third of the sum of adjacent triangle areas:
$$ M_{ii} = \sum_{f\supset v_i} \frac{1}{3} Area(f)$$
We then define $\Delta_{cotan} = M^{-1}L$.
:::info
Note that some PDE formulations on meshes may only consider the *weak* for of the Laplace-Beltrami operator $L$ (see below).
:::
6. In a `numpy array`, `scipy sparse matrix`, or an `Eigen::MatrixXd` (or even better, a [Sparse Matrix](https://eigen.tuxfamily.org/dox/group__TutorialSparse.html)), implement the Laplace-Beltrami operator on triangular meshes. Make sure that all rows and columns of $L$L sum up to zero. For some scalar functions of question 1, compute and show $\Delta_{cotan} F$ ($F$ being the vector of size $|V|$ containing $\{f(v_i)\}_{v_i\in V}$, the product is a vector defining a vertex scalar quantity). $E.g.$ the Laplacian must be zero on linear functions.
We would like to use the Laplace-Beltrami opertator to solve [Dirichlet problems](https://en.wikipedia.org/wiki/Dirichlet_problem) on meshes. For instance, related to the [Laplace's equation](https://en.wikipedia.org/wiki/Laplace%27s_equation), we want to find $f$ such that:
$$\begin{align}
\Delta u &= 0\\
&s.t.\,\, u =g_0 \text{ on } \partial \Omega
\end{align}
$$
For short, some values are given at the boundary of a mesh ($g_0$) and we want to *diffuse* the values to remaining vertices.
As $\Delta_{cotan}$ is a linear operator represented as a (sparse) matrix, solving the Laplace's equation corresponds to solving a linear system $Ax=b$.
7. Using `numpy` (e.g. [doc](https://numpy.org/doc/stable/reference/generated/numpy.linalg.solve.html)), `scipy` (e.g. [doc](https://docs.scipy.org/doc/scipy/reference/generated/scipy.sparse.linalg.spsolve.html#scipy.sparse.linalg.spsolve)), `eigen` ([doc](https://eigen.tuxfamily.org/dox/group__TutorialLinearAlgebra.html)), or `geometry-central` wrapper (e.g. [doc](https://geometry-central.net/numerical/linear_solvers/)) linear algebra solver, implement a Lapalce's equation solver on the `spot.obj` or `bimba.obj` (you would have to set some values at on some vertices).
:::warning
**Warning**: When discretizing the problem boundary conditions should taken carefully into consideration. For instance, as $u$ is fixed to values $g_0$ at some vertices, the Dirichlet boundary condition setting would make the boundary vertices to be removed from the linear problem ($i.e.$ some rows/cols of $L$ must be removed). We won't go into the details for this practical but just be aware of that.
:::
::: info
For higher efficiency, you can consider sparse matrices and sparse solvers. Note that $\Delta_{cotan}$ is Positive Semi-Definite (PSD) for which very efficient pre-factorization based solvers can be used.
Note that on meshes without boundaries, discrete variants of the Laplace-Beltrami operator are not full-rank, the kernel is spanned by the constant function.
One way to numerically stabilize the Laplace/Poisson solver is to consider the operator $(L + \epsilon Id)$ (with small $\epsilon$).
:::
You should get something like that:
| init | $g_0$ | $u$ |
| ----- | ---- | ---- |
|  |  | |
::: info
For Laplace problems: solving $\Delta_{cotan}u=0$ $\Leftrightarrow$ $Lu=0$.
For [Poisson problems](https://en.wikipedia.org/wiki/Poisson%27s_equation), solving $\Delta_{cotan}u=f$ $\Leftrightarrow$ $M^{-1}Lu=f$ $\Leftrightarrow$ $Lu=Mf$. So, no need to inverse the mass matrix and we can keep it sparse.
:::
::: success
The resulting function $u$ has very nice properties as $u$ is [harmonic](https://en.wikipedia.org/wiki/Harmonic_function) (smooth, mean value property,...).
:::
# Geodesic in Heat
At this point, we have some basic operators, the Laplace-Beltrami one (which is the Swiss army knife for many geometry processing algorithms), and already solved a first basic, yet fundamental, elliptic PDE.
We would like now to estimate geodesic on meshes and for that, we will use the heat kernel approach[^2]. The intuition is the following one: you heat up the surface at given point $x_0$ and you measure the temperature at another point $y$ (at a given time $t$). The heat flow follows the [heat diffusion equation](https://en.wikipedia.org/wiki/Heat_equation)
$$ \frac{\partial k_{t,x_0}}{\partial t} = \Delta k_{t,x_0} $$
Then the geodesic distance between $x_0$ and $y$ (known as Varadhan's formula):
$$ d(x_0,y) = \operatorname{lim}_{t\rightarrow 0} \sqrt{-4t\log(k_{t,x_0}(y))}$$
We can thus solve the heat equation using an Euler scheme for instance, and then to take the $log$ of that function to get the distance. However, this turns out to be highly numerically unstable.
In the following we will be considering the **Geodesic in Heat**[^2] approach which involves three steps:
* First, we solve the heat equation for $u$ such that $\dot{u}=\Delta u$, for small $t$ using a single step backward Euler.
* Construct the vector field: $X = -\nabla u/\|\nabla u\|$.
* Solve the Poisson equation $\Delta \phi = \operatorname{div}(X)$.
The intuition is that values of $u$ are not reliable but its gradient is. Then, we are looking for the smoothest function $\phi$ that matches with the sinks/sources of the normalized vector field (its divergence).
8. Compute and display the solution of the heat equation by solving: $$ (M + t L)U = MU_0$$ ($U$ is a $|V|$ vector, $U_0$ is a null vector except at source vertices --`1.0` for instance--).
::: warning
**Few details on the backward Euler**: to solve $\dot{u}=\Delta u$, we discretize the time and use the backward Euler scheme in $t$: $u(t+1) = u(t) + t\Delta u_{t+1}$. By stability of this scheme, we can do a single step approximation with:
$$ u_t= u_0 + t\Delta u_t$$
Leading to
$$ (I - t\Delta)u_t = u_0$$
Once discretized with $-\Delta \approx M^{-1}L$, we end up with
$$(M + tL)U = MU_0\,.$$
:::
9. Compute and display $\nabla u$, $X$ and $\operatorname{div}(X)$.
10. Complete the overall **Geodesic in Heat** approach to compute $\phi$.
11. Experiment your code for various (but small) values of $t$.
12. If now we want to change the source vertex $x_0$ in $U_0$, what we would have to update in the algorithms?
:::info
**Few hints:**
* As for the Laplace problem, you'd need a fast-linear solver on Sparse Matrix from either `eigen` or `numpy`. For non-degenerate triangulation $\Delta_{cotan}$ is Positive semi-definite (PSD) which admists fast prefactorized solvers for sparse matrix.
* In `polyscope`, distances can be displayed using a dedicated distance quantity (cf [[c++]](https://polyscope.run/structures/surface_mesh/distance_quantities/), [[python]](https://polyscope.run/py/structures/surface_mesh/distance_quantities/)) with nice isolines shader.
* You can add as many sources as you want in $U_0$.
:::
and *voilà*...

[^1]: De Goes, Fernando, Andrew Butts, and Mathieu Desbrun. "Discrete differential operators on polygonal meshes." ACM Transactions on Graphics (TOG) 39.4 (2020): 110-1.
[^2]: Crane, Keenan, Clarisse Weischedel, and Max Wardetzky. "Geodesics in heat: A new approach to computing distance based on heat flow." ACM Transactions on Graphics (TOG) 32.5 (2013): 1-11.