# Segmentation d'image - modèles hybrides
## (Traitement et Analyse d'Image 5d)
>
> [name=Jacques-Olivier Lachaud][time=Decembre 2020][color=#907bf7] Laboratoire de Mathématiques, Université Savoie Mont Blanc
> (Les images peuvent être soumises à des droits d'auteur. Elles sont utilisées ici exclusivement dans un but pédagogique)
###### tags: `info911`
Retour à [INFO911 (Main) Traitement et analyse d'image](https://codimd.math.cnrs.fr/s/UE_B59gMy)
---
# Modèles hybrides pour la segmentation
:::danger
Objectifs d'une **bonne** segmentation mal définie
approches régions et contours peuvent donner des résultats intéressants, mais:
* stabilité du résultat en fonction d'une variation de l'entrée ou des paramètres ?
* comment faire cohabiter information de région et information de contour ?
* sortie = résultat d'un algorithme, mais pas d'un modèle attendu
:::
:::info
Nécessité de construire des **modèles** définissant l'attendu, avant de mettre au point des algorithmes pour trouver la meilleure solution (modèle variationnel).
:::
> Apparition de modèles dans les années 1990 [color=#907bf7]
---
## Principaux modèles
:::success
* Modèle de Mumford-Shah [1989]
* Snakes / contours actifs / contours actifs géodésiques [1989 -- 1998]
* Modèle de Chan-Vese [2001]
* Modèle Variation Totale [Rudin, Osher, Fatemi 1992 ]
:::
:::success
* Approches bayesiennes par champ de markov [1984]
* Approches graphes et optimisation par graph-cut [2000]
:::
:::info
Pour chaque résultat $u$, chaque modèle définit une **énergie** $E(u)$
Un algorithme d'**optimisation** cherche ensuite le $u_{opt}$ qui minimise $E(u)$
:::
---
# Modèles "continus"
:::success
* Modèle de Mumford-Shah [1989]
* Snakes / contours actifs / contours actifs géodésiques [1989 -- 1998]
* Modèle de Chan-Vese [2001]
* Modèle Variation Totale [Rudin, Osher, Fatemi 1992 ]
:::
---
## Le modèle de Mumford-Shah [1989]
**Input**: fonction image $g$ de domaine $\Omega$.
**Energie**: soit $K$ un ensemble de contours et une fonction $u$ lisse sur $\Omega \setminus K$.
$$
E(u,K)=\alpha \underbrace{\int_\Omega |g-u|^2}_\text{attache aux données} + \beta \underbrace{\int_{\Omega \setminus K} |\nabla u |^2}_\text{reconstruction lisse} + \gamma \underbrace{\mathrm{Longueur}(K)}_\text{géométrie simple}
$$
:::warning
Problème: trouver $u_{opt},K_{opt}$ qui minimise $E$
:::
==Intuitivement== régions homogènes sinon 1er et 2e termes coûteux, $K$ placé sur les contours sinon 2e terme coûteux, pas trop de contours sinon 3e terme coûteux
---
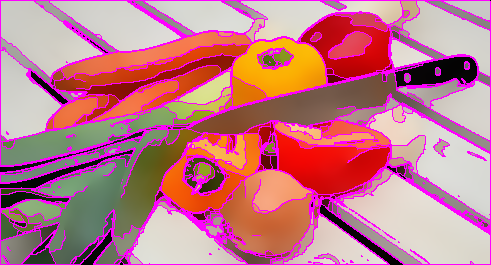
## Modèle de Mumford Shah: exemples de résultats [2017]
| Image $g$ | reconstruction $u$, contour $K$ en rouge |
|:---------------------------------------------------------------------------------------------------------:|:----------------------------------------------------------------------------------------------------------:|
|  |  |
---
## Modèle de Mumford Shah: exemples de résultats [2017]
| Input $g$ | MS $\alpha=1, \beta=1, \gamma=0.01$ | MS $\alpha=0.01, \beta=1, \gamma=0.001$ |
| -------- | -------- | -------- |
|  | |  |
`at-grad`, `segmentation-mumford-shah-color`
---
## Intérêts/défauts du modèle de Mumford-Shah
:::success
* formulation unifiant **homogénéité** des régions et **hétérogénéité** des contours
* contrainte **géométrique** sur les régions (périmètre court)
* inspiration de centaines de méthodes et de milliers d'articles
:::
:::danger
* énergie non convexe => pas d'algorithme simple d'optimisation
* dans cette formulation, aucun algorithme praticable d'optimisation
* grand espace des paramètres
* coût en calcul important (ici 1min)
:::
---
## Snakes, contours actifs [Kass, Witkin, Terzopoulos 1992]
Soit $C(t)=(x(t),y(t))$ une courbe paramètrique, $t \in [0,1]$
$$
E(C)=\int_0^1 \underbrace{-\|\nabla I(x(t),y(t))\|^2}_\text{attache aux contours} +\alpha \underbrace{(x'(t)^2+y'(t)^2)}_{\approx\text{longueur}}+\beta \underbrace{(x''(t)^2+y''(t)^2)}_{\approx\text{courbure}} dt
$$
On cherche $C_{opt}=\arg\min_C E(C)$
:::success
Recherche les forts gradients, donc les contours. Favorise des courbes lisses.
Plus facile à coder (en 2D), rapide, interactif.
:::
:::danger
Optimisation très sensible à l'initialisation. Cherche une forme simple.
:::
---
## Snakes : exemple de résultats 2D

---
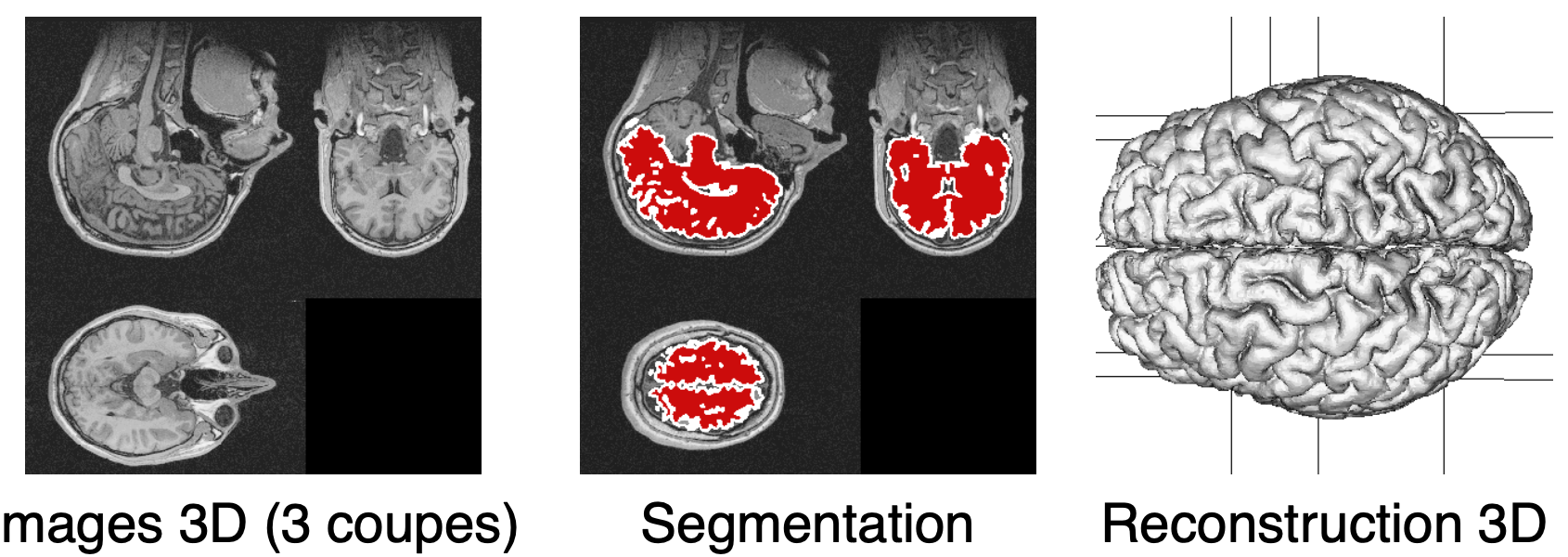
## Snakes : exemple de résultats 3D [2004]
Surface triangulée déformable
---
## Modèle de Chan-Vese [2001]
Modèle efficace pour segmentation en objet / fond
## Modèle Variation Totale [Rudin, Osher, Fatemi 1992 ]
Modèle surtout efficace en restauration d'image, et inpainting.
---
# Modèles "discrets"
:::success
* Approches bayesiennes par champ de markov [1984]
* Approches graphes et optimisation par graph-cut [2000]
:::
---
## Approches graphes et optimisation par graph-cut [2000]
Domaine transformé en graphe $G:=(V \cup \{s,t\},E)$ où $V$=pixels, plus deux noeuds $s,t$

Poids $w(s,p)$ : attache à la région 1, e.g. $w(s,p):=|I(p)-\textrm{moyenne}(R_1)|$
Poids $w(t,p)$ : attache à la région 2, e.g. $w(s,p):=|I(p)-\textrm{moyenne}(R_2)|$
Poids $w(p,q)$ : coût du contour, e.g. $\lambda$
==Coupe== dans $G$: $C \subset E$ tel que $s$ et $t$ séparés par $C$
==Coupe minimal==: on cherche $C_{opt}$ qui minimise $\sum_{e \in C} w(e)$
---
## grabcut: exemple de résultats
En bleu, pixels associés au fond $s$, en rouge pixels associés à l'objet
| | |
| -------- | -------- |
|  |  |
Attache aux données: Gaussian Mixture Model et champ de Markov
`grabcut` `video-grabcut`
---
## Some comparisons

{"title":"INFO911 (5d) Segmentation - modèles hybrides","type":"slide","slideOptions":{"transition":"slide","progress":true,"slideNumber":true}}